We list the Reidemeister moves in Fig.
and would like to leave details to other books in knot theory,
and recall the most fundamental theorem of Reidemeister we rely on.
Figure:
reidmoves
Theorem 2.1 (Reidemeister)
Let , be two diagrams representing the same equivalent
knot. Then is obtained from by
a sequence of Reidemeister moves and isotopy of the plane
.
Figure:
Moves with a height function specified
Remark 2.2
There are variations of Reidemeister moves in various
situations and set-ups.
Here we mention three variations.
The Jones polynomial was first discovered through braid group
representations [Jones87].
Two theorems play key roles (see, for example, [Kau91,Kama02]):
Alexander's theorem says that any knot or link can be represented
as a closed braid, and Markov's theorem says how closed braid forms of
the same knot are related (related by congugations and Markov
de-stabilizations).
Thus the relations of the braid groups
and Markov (de-)stabilizations play the role of Reidemeister moves.
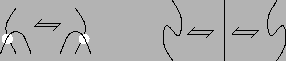
In defining the Jones polynomial
from an operator approach [Kau91],
a height function is fixed on the plane, and local maxima and minima
of knot diagrams plays an important role (a pairing and a copairing
are assigned to them).
Then moves involving these become necessary to take into considerations.
These additional moves, called Freyd-Yetter moves and
depicted in Fig. , are considered also in
formulating category formed by knot diagrams [FY89].
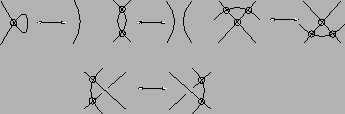
For virtual knots, Reidemeister moves are symbolically interpreted
in terms of Gauss codes, then reinterpreted in terms of virtual knot diagrams,
see [Kau99], for example. Those moves involving virtual crossings
are depicted in Fig. .
Another variation is to assign parenthesis structures on arcs of the
diagrams, called non-associative tangles [BN97].
These were used for the study of finite type invariants of knots.